Embedded Operating Systems
Introduction
-
A simple embedded system is
while true
read a value from an I/O port
do something
-
A more complex one might have to poll several devices
while true
select a ready I/O device
read a value from the I/O port
do something
-
Doing something might involve memory access
while true
read a value from an I/O port
get an unused chunk of memory
do something with this memory
release memory
-
It may involve multitasking
while true
select a thread
in this thread
read a value from an I/O port
do something
-
It may involve handling interrupts from devices
set up interrupt handlers
while true
do something
handler1:
disable interrupts
process interrupt from device1
enable interrupts
Functions of an O/S
An O/S is required when the complexity of functions to be done gets
too high for one-off programming
-
An O/S can use a device driver, which gives a higher-lever
software interface to a device than is given by the
manufacturer
-
An O/S can supply interrupt handling mechanisms and polling
mechanisms to deal with asynchronous and synchronous
device handling
-
An O/S supplies memory management routines to gain and free
memory
-
An O/S running on protected mode hardware can use virtual
memory to protect memory in one process from another one
-
An O/S can look after task/process/thread scheduling
-
An O/S supplies a software abstraction layer (the O/S API -
Application Programmers Interface) that can be used
to
-
manage memory
-
manage proceses
-
manage devices
Typical O/S
-
MSDOS
-
MSDOS was the precursor of Windows. Is is designed for the
8086, an unprotected mode processor with 1M address space.
MSDOS will run in only 64k. It is a primitive O/S, but is
used very heavily for embedded applications which don't
have complicated or heavy requirements. It is used
in about 15% of embedded systems in 2001
-
Windows 3.1
-
This was an application layer on top of MSDOS that added
task switching to MSDOS. It has no use for embedded systems
-
Windows NT, Windows 2000, Windows XP
-
These are all protected mode O/S built on good O/S principles.
In their standard form they are not suitable for embedded
systems because
-
They require a graphical user interface, which will
not be present on e.g. a sprinkler
-
They have a lot of "baggage" which is usually not
needed for an embedded O/S e.g. most of the device
drivers will not be needed
-
They are not realtime, with unpredictable amounts
of time before a task is scheduled
Windows CE (Compact Edition) was used in about 10% of embedded
systems in 2001
-
Linux
-
This is a protected mode O/S built on good O/S principles.
It uses a standard API, defined by POSIX.
In its standard form it is not suitable for embedded
systems because
-
It has a lot of "baggage" which is usually not
needed for an embedded O/S e.g. most of the device
drivers will not be needed
-
It is not realtime, with unpredictable amounts
of time before a task is scheduled
Linux was used in about 12% of embedded systems in 2001
Dedicated Realtime/Embedded O/S
-
An O/S designed for embedded systems is usually designed
for several different criteria
-
It must run on a number of processors
-
It may need to run in very small memory configurations
-
It may need to support realtime applications
-
There are a number of commercial O/S's that meet these
criteria including
-
VxWorks (about 18% in 2001)
-
QNX (about 5% in 2001)
-
LynxOS (about 5% in 2001)
-
Symbian - used in nearly all mobile phones using an O/S (in 2003)
Typical O/S sizes
-
Some minimal configurations:
-
LynxOS: 150kb
-
BlueCat Linux: 260kb
-
Windows XP Embedded: 5Mb
-
Some typical configurations:
-
LynxOS: 250kb
-
Linux: 500kb
-
Windows XP Embedded: 15Mb
Source: wwwl.linuxdevices.com "LynuxWorks responds to Microsoft attack
on Embedded Linux"
Scheduling algorithms
-
A non-realtime system can use a scheduling algorithm such as
schedule:
update status of all processes
choose runnable process with highest priority
restart this process
interrupt:
set interrupt flag on process
update process:
if interrupt set, set status to runnable
increase priority of process
-
The non-realtime scheduler will place processes in a priority
list, and run a process when it has the highest priority
-
A realtime system cannot afford these delays in processing interrupts.
A realtime system might adopt a scheduler such as
interrupt:
process for this interrupt pre-empts current process
-
Realtime scheduling algorithms are discussed in Stallings
Making non-realtime into realtime
-
A trick can be used to make non-realtime systems such as
Linux into realtime systems: run two schedulers
-
The first scheduler handles all non-realtime processes,
and is the usual Linux scheduler
-
A second scheduler is a realtime scheduler, and handles all
hard realtime processes
-
The realtime scheduler runs the Linux scheduler as the default
task, which can be interrupted by an realtime process
-
When no realtime processes are running, the "ordinary" Linux
processes are run
O/S boot sequence
When a system starts up, the hardware goes through an initialisation
phase and then jumps to a fixed address to start the O/S. On a PC-like
system for Linux, this is
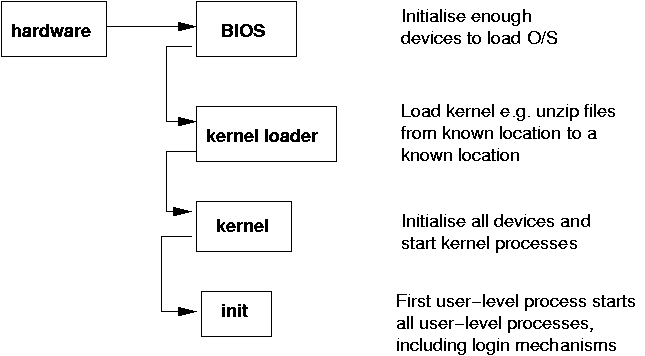 For an embedded system, the
For an embedded system, the init process can perform
something appropriate for that system - e.g. starting motors, rather
than logging someone in
References
-
R. Lehrbaum Bully in the (embedded) playground,
pp52-57, March 2002, Linux Journal
-
W. Stallings Operating Systems - internals and design
principles, Prentice-Hall
-
IEEE standard POSIX
-
P.M. Adams Writing Unix Device Drivers in C, Prentice-Hall
-
M. Beck et al Linux Kernel Internals, Addison_Wesley
Jan Newmarch <jan@newmarch.name>
Last modified: Sun Mar 2 09:59:08 EST 2003